mirror of
https://github.com/openharmony/device_soc_asrmicro.git
synced 2026-07-01 22:34:00 -04:00
Executable → Regular
+43
-40
@@ -1,9 +1,15 @@
|
||||
# device asrmicro
|
||||
## 介绍
|
||||
|
||||
该仓库托管翱捷科技开发的样例代码
|
||||
本仓库托管翱捷科技开发的样例代码,包含hal模块、wifi库文件、ble库文件等。内容共分为如下几部分:
|
||||
* 目录结构
|
||||
* 编译环境搭建
|
||||
* 编译流程
|
||||
* 烧录流程
|
||||
* 相关仓库
|
||||
* 常见错误与处理
|
||||
|
||||
## 目录
|
||||
## 代码目录
|
||||
```
|
||||
device/soc/asrmicro
|
||||
├── asr582x # ASR芯片名称
|
||||
@@ -16,22 +22,20 @@ device/soc/asrmicro
|
||||
├── Kconfig.liteos_m.defconfig # kconfig 默认配置宏
|
||||
├── Kconfig.liteos_m.series # 系列soc配置宏
|
||||
├── Kconfig.liteos_m.soc # soc kconfig配置宏
|
||||
└── tools # 烧录工具包目录
|
||||
└── tools # 烧录工具文档目录
|
||||
```
|
||||
## 编译环境搭建
|
||||
|
||||
系统要求: Ubuntu18.04 64位系统版本。
|
||||
系统要求: [Ubuntu18.04 64位系统版本](https://releases.ubuntu.com/18.04/)。
|
||||
|
||||
编译环境搭建包含如下几步:
|
||||
|
||||
1. 安装库和工具
|
||||
2. 安装repo
|
||||
3. 获取源码
|
||||
4. 安装python3
|
||||
5. 安装hb
|
||||
6. 安装arm-none-eabi-gcc
|
||||
7. 编译流程
|
||||
8. 烧录流程
|
||||
* 安装库和工具
|
||||
* 安装repo
|
||||
* 获取源码
|
||||
* 安装python3
|
||||
* 安装hb
|
||||
* 安装arm-none-eabi-gcc
|
||||
|
||||
### 安装库和工具
|
||||
|
||||
@@ -40,7 +44,7 @@ device/soc/asrmicro
|
||||
sudo apt-get update && sudo apt-get install build-essential gcc g++ make zlib* libffi-dev e2fsprogs pkg-config flex bison perl bc openssl libssl-dev libelf-dev libc6-dev-amd64 binutils binutils-dev libdwarf-dev u-boot-tools mtd-utils gcc-arm-linux-gnueabi cpio device-tree-compiler git git-lfs
|
||||
```
|
||||
### 安装repo
|
||||
1. 配置git用户信息。
|
||||
1. 配置git用户信息:
|
||||
|
||||
```
|
||||
git config --global user.name "yourname"
|
||||
@@ -48,7 +52,7 @@ sudo apt-get update && sudo apt-get install build-essential gcc g++ make zlib* l
|
||||
git config --global credential.helper store
|
||||
```
|
||||
|
||||
2. 安装码云repo工具,可以执行如下命令。
|
||||
2. 安装码云repo工具:
|
||||
|
||||
```
|
||||
curl -s https://gitee.com/oschina/repo/raw/fork_flow/repo-py3 > /usr/local/bin/repo #如果没有权限,可下载至其他目录,并将其配置到环境变量中
|
||||
@@ -72,8 +76,7 @@ repo forall -c 'git lfs pull'
|
||||
|
||||
### 安装Python3
|
||||
|
||||
1. 打开Linux编译服务器终端。
|
||||
2. 输入如下命令,查看python版本号:
|
||||
1. 打开Linux编译服务器终端,输入如下命令,查看python版本号:
|
||||
|
||||
```
|
||||
python3 --version
|
||||
@@ -81,17 +84,17 @@ repo forall -c 'git lfs pull'
|
||||
|
||||
如果低于python3.7版本,不建议直接升级,请按照如下步骤重新安装。
|
||||
|
||||
3. 运行如下命令安装python 3.8。
|
||||
2. 运行如下命令安装python 3.8。
|
||||
|
||||
```
|
||||
sudo apt-get install python3.8
|
||||
```
|
||||
4. 设置python和python3软链接为python3.8。
|
||||
3. 设置python和python3软链接为python3.8。
|
||||
```
|
||||
sudo update-alternatives --install /usr/bin/python python /usr/bin/python3.8 1
|
||||
sudo update-alternatives --install /usr/bin/python3 python3 /usr/bin/python3.8 1
|
||||
```
|
||||
5. 安装并升级Python包管理工具(pip3)。
|
||||
4. 安装并升级Python包管理工具(pip3):
|
||||
|
||||
```
|
||||
sudo apt-get install python3-setuptools python3-pip -y
|
||||
@@ -100,12 +103,12 @@ repo forall -c 'git lfs pull'
|
||||
|
||||
### 安装hb
|
||||
|
||||
1. 运行如下命令安装hb
|
||||
1. 运行如下命令安装hb:
|
||||
|
||||
```
|
||||
pip3 install build/lite
|
||||
```
|
||||
2. 设置环境变量
|
||||
2. 设置环境变量:
|
||||
|
||||
```
|
||||
vim ~/.bashrc
|
||||
@@ -143,7 +146,7 @@ repo forall -c 'git lfs pull'
|
||||
### 安装arm-none-eabi-gcc
|
||||
|
||||
1. 打开Linux编译服务器终端。
|
||||
2. 下载[arm-none-eabi-gcc 编译工具下载](https://armkeil.blob.core.windows.net/developer//sitecore/shell/-/media/Files/downloads/gnu-rm/5_4-2016q3/gcc-arm-none-eabi-5_4-2016q3-20160926-linux,-d-,tar.bz2)
|
||||
2. 下载[arm-none-eabi-gcc 编译工具下载](https://armkeil.blob.core.windows.net/developer//sitecore/shell/-/media/Files/downloads/gnu-rm/5_4-2016q3/gcc-arm-none-eabi-5_4-2016q3-20160926-linux,-d-,tar.bz2)。
|
||||
|
||||
|
||||
3. 解压 [gcc-arm-none-eabi-5_4-2016q3-20160926-linux.tar.bz2](https://armkeil.blob.core.windows.net/developer//sitecore/shell/-/media/Files/downloads/gnu-rm/5_4-2016q3/gcc-arm-none-eabi-5_4-2016q3-20160926-linux,-d-,tar.bz2) 安装包至 /tmp/asr 路径下。
|
||||
@@ -155,61 +158,61 @@ repo forall -c 'git lfs pull'
|
||||
├── share
|
||||
└── arm-none-eabi
|
||||
```
|
||||
然后添加gcc路径到环境变量
|
||||
然后添加gcc路径到环境变量:
|
||||
```
|
||||
echo 'export PATH=/tmp/asr/gcc-arm-none-eabi-5_4-2016q3/bin:$PATH' >> ~/.bashrc
|
||||
source ~/.bashrc
|
||||
```
|
||||
|
||||
### 编译流程
|
||||
## 编译流程
|
||||
|
||||
[编译构建使用指南](https://gitee.com/openharmony/docs/blob/master/zh-cn/device-dev/subsystems/subsys-build-mini-lite.md)
|
||||
|
||||
在OpenHarmony代码根目录执行以下命令:
|
||||
```shell
|
||||
hb set
|
||||
|
||||
使用键盘方向键进行板卡demo选择:
|
||||
asrmicro
|
||||
> wifi_demo
|
||||
> xts_demo
|
||||
|
||||
选择: wifi_demo
|
||||
如果选择: wifi_demo,则执行以下编译命令:
|
||||
|
||||
hb build -f
|
||||
|
||||
或选择: xts_demo
|
||||
如果选择: xts_demo,则执行以下编译命令:
|
||||
|
||||
hb build -f --gn-args build_xts=true
|
||||
```
|
||||
|
||||
### 烧录流程
|
||||
## 烧录流程
|
||||
|
||||
1. 下载 [DOGO_VP2.0.3.7Z](https://gitee.com/lango-tech_0/tools/blob/master/DOGO_VP2.0.3.7z) 到windows 环境下解压,并双击 DOGO_VP2.0.3.exe
|
||||
2. 串口连接 PC 和 demo board,点击“检测串口”按键,在串口选择一栏选择对应的端口号并点击 “打开串口”
|
||||
3. 选择 “ChipType ”类型为 582X
|
||||
4. 点击“路径设置”,待弹出小窗口后点击 bootload 对应的“browser”进入目录选择待烧录的
|
||||
image 文件。
|
||||
1. 下载 [DOGO_VP2.0.3.7Z](https://gitee.com/lango-tech_0/tools/blob/master/DOGO_VP2.0.3.7z) 到windows 环境下解压,并双击 DOGO_VP2.0.3.exe。
|
||||
2. 串口连接 PC 和 demo board,开发板接通电源后,点击“检测串口”按键,在串口选择一栏选择对应的端口号并点击 “打开串口”。
|
||||
3. 选择 “ChipType ”类型为 582X。
|
||||
4. 点击“路径设置”,待弹出小窗口后点击 bootload 对应的“browser”进入目录选择待烧录的image 文件,bootloader的bin文件位于device/soc/asrmicro/asrxx/liteos_m/sdk/tools目录,app的bin文件位于out/dev_wifi_a/xx_demo目录。
|
||||
|
||||
**图 1** Dogo选择
|
||||

|
||||
|
||||
5. 点击“确认”关闭小窗口,勾选“only image”
|
||||
6. 将 ASR582X 设置为 Uart boot 模式
|
||||
5. 点击“确认”关闭小窗口,bootloader烧录一次即可,再次烧录可勾选“only image”只烧录app文件。
|
||||
6. 将 ASR582X 设置为 Uart boot 模式。
|
||||
[朗国开发板设置为"Uart boot"模式 操作参考](https://gitee.com/openharmony-sig/device_board_lango#3-%E8%BF%9B%E5%85%A5%E7%83%A7%E5%BD%95%E6%A8%A1%E5%BC%8F-uart-boot-%E6%A8%A1%E5%BC%8F)
|
||||
7. Demo 板接通电源后,按下复位键,待出现“1F2E3D00”后点击“烧录”
|
||||
7. Demo 板接通电源后,按下复位键,待出现“1F2E3D00”后点击“烧录”。
|
||||
|
||||
**图 2** Dogo烧录
|
||||

|
||||
|
||||
8. 烧录完成后, 将 ASR582X 设置为 Flash boot 模式,按下复位键,DOGO 串口接收窗口中即可以看到程序正常运行
|
||||
8. 烧录完成后, 将 ASR582X 设置为 Flash boot 模式,按下复位键,DOGO 串口接收窗口中即可以看到程序正常运行。
|
||||
[朗国开发板设置"Flash boot"模式 操作参考](https://gitee.com/openharmony-sig/device_board_lango#5-%E9%80%80%E5%87%BA%E7%83%A7%E5%BD%95%E6%A8%A1%E5%BC%8F-%E8%BF%9B%E5%85%A5flash-boot-%E6%A8%A1%E5%BC%8F)
|
||||
|
||||
# 相关仓
|
||||
## 相关仓库
|
||||
|
||||
* [device/soc/asrmicro](https://gitee.com/openharmony-sig/device_soc_asrmicro)
|
||||
* [device/board/lango](https://gitee.com/openharmony-sig/device_board_lango)
|
||||
|
||||
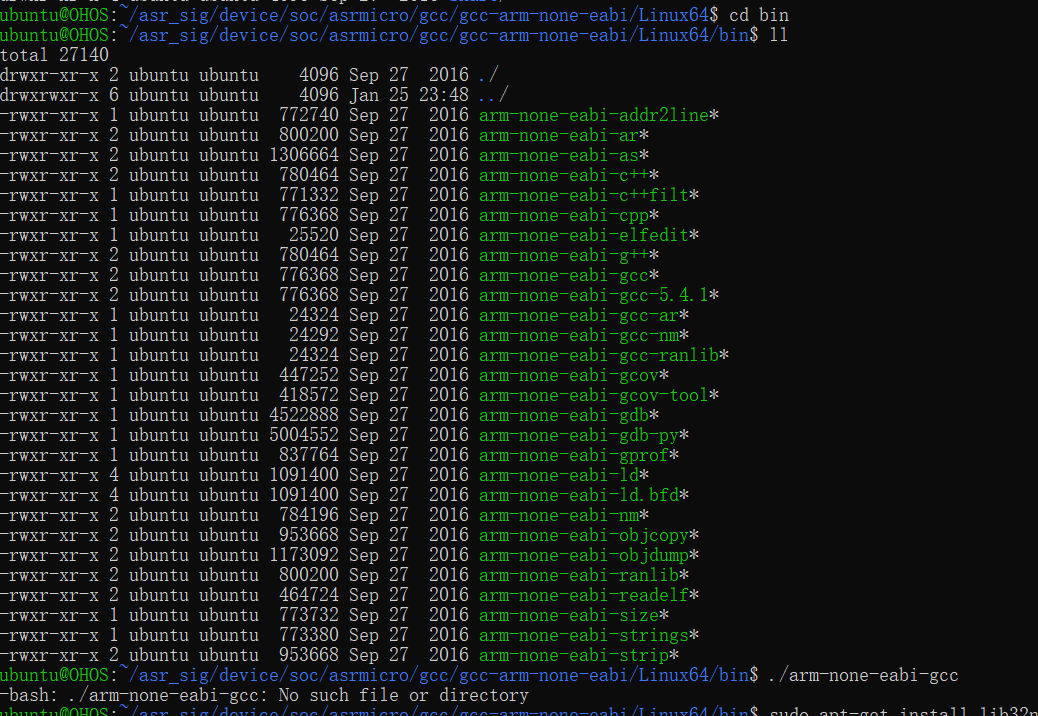
# 常见错误与处理
|
||||
### 1、Ubuntu 20.04.3 LTS 下编译报错
|
||||
## 常见错误与处理
|
||||
### 1. Ubuntu 20.04.3 LTS 下编译报错
|
||||
编译出现如错误:
|
||||
```-bash: ./arm-none-eabi-gcc: No such file or directory```
|
||||
|
||||
|
||||
Executable → Regular
BIN
{kind=link}
Binary file not shown.
|
Before Width: | Height: | Size: 34 KiB After Width: | Height: | Size: 71 KiB |
Reference in New Issue
Block a user